
我们的超薄伺服系列
新的超薄伺服系列解决方案基于弹簧压力原理,适用于具有高制动能量和长要求使用寿命的工业机器人。
新的伺服细线解决方案以弹簧压力原理为基础,适用于具有高制动能量和长使用寿命的工业机器人。
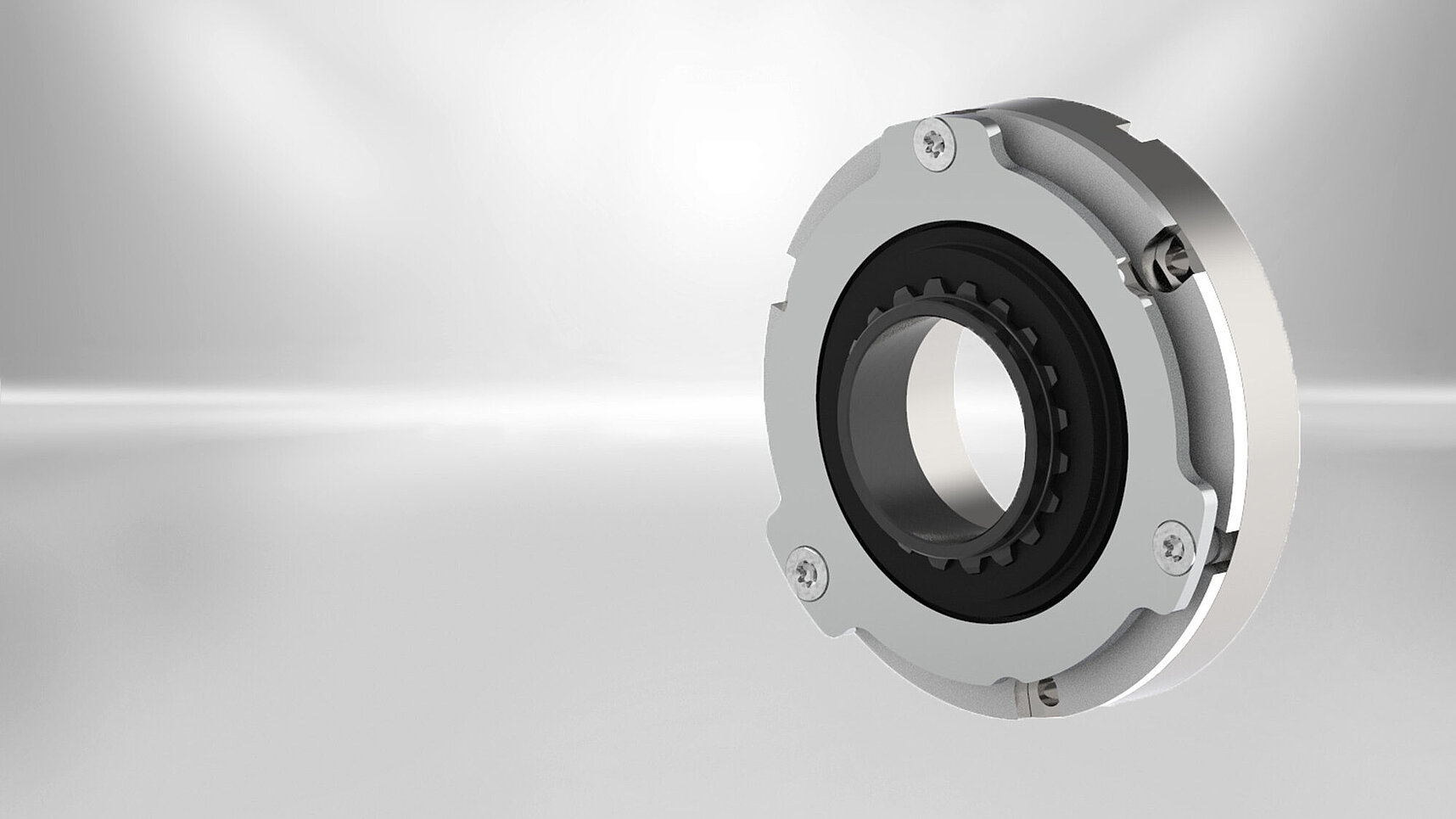
适用于机器人的弹簧式制动器是为约20kg负载的机器人解决方案设计的,但它也可用于其他小尺寸空间要求的应用。就其功率密度而言,超薄单盘制动器比市场标准更扁平、更轻,由于其大的内径,它们很适合空心轴驱动。这使得它们非常适合应用于带有集成驱动器的轻型机器人。
机器人技术的最佳解决方案
为了避免碰撞造成的伤害,特别是在控制系统或者电源发生故障的情况下,人们对安全技术的要求越来越高。在这种情况下,电磁制动器通常是首选的方法。作为安全制动器,它们可以使移动的物体停止,保持负载的位置,从而防止人员和物品资产受到损伤。
几十年来,康德瑞恩一直为负载超过20公斤的工业机器人提供制动器。为了能够服务于蓬勃发展的小型机器人市场,制动器专家近年来在研究和开发适合机器人应用的制动器方面进行了大量投资。凭借多年的经验和市场的最新发现,我们已经开发出了理想的适合机器人的解决方案。
制造技术
专利制造技术为该解决方案提供了基础。在传统的弹簧制动器中,必须考虑与生产有关的气隙公差,即摩擦片和衔铁之间的距离。当为最坏情况设计制动器时,要考虑最大额定气隙。寿命和扭矩都与所谓的最大工作气隙直接相关,它是由最大额定气隙和磨损产生的。因此,保持尽可能窄的额定气隙至关重要。使用传统的制造技术,额定气隙的公差可以达到0.1mm到0.2mm之间。使用康德瑞恩验证过的解决方案,标准的气隙公差约为0.04毫米。节省下来的潜力用来增加保持扭矩或延长使用寿命,从而提高制动器的功率密度。
来自实验室的专业知识
当涉及到数据的验证和核实时,用户可以依靠制动器专家专业的实验室团队。多年来,康德瑞恩在测试和认证其产品方面已经形成了强大的能力。实验室配备了测量范围从0.1 Nm到10,000 Nm的测试设备。测试设置1:1地反映了应用条件,因此可以重现真实情况。所有的测量数据都是在如温度、摩擦功、旋转速度和旋转方向等不同的工作条件下记录的并收集整理成技术数据。基于此,能够为用户提供充分的技术细节支撑。
技术规格
| 最小传输扭矩M4min[Nm] | 0,27 | 0,3 | 0,6 | 1,7 | 4,0 | 5,0 | 8,0 | ||
|---|---|---|---|---|---|---|---|---|---|
| 额定功率PN[W] | 5,8 | 8,3 | 10,3 | 11,4 | 14 | 20 | 27,2 | ||
| 标准额定电压UN[VDC] | 12 | 24 | 24 | 24 | 24 | 24 | 24 | 24 | |
| 环境温度 | -10 til 100 | -10 til 100 | -10 til 100 | -10 til 100 | -10 til 100 | -10 til 100 | -10 til 100 | -10 til 100 | -10 til 100 |
| 紧急停车次数Zges mit W1max | 200 | 200 | 200 | 200 | 200 | 200 | 200 | 200 | 200 |
| 额定速度 nn [min-1] | 6000 | 6000 | 5000 | 4000 | 3000 | 3000 | 2500 | ||
| 外径D1[mm] | 32 | 38 | 51 | 69 | 86 | 105 | 127 | ||
| 内径 D2 [mm] | 9 | 11,5 | 22 | 30 | 42 | 58 | 63 | ||
| 内径 L1 [mm] | 16 | 16 | 16 | 18 | 20 | 21 | 29,3 |