
Sicherheitsarchitektur für die Robotik. Bereit für 2028!
Offene Sicherheitsarchitektur für die nächste Generation der Robotik
Neue Anforderungen durch ISO 10218:2025, steigende Komplexität in MRK-Anwendungen (Mensch-Roboter-Kollaboration) und proprietäre Safety-Lösungen stellen Maschinenbauer, Robotik-OEMs und Integratoren vor neue Herausforderungen. Safety muss heute frühzeitig Teil der Architekturentscheidung sein – denn spätere Anpassungen verursachen hohen Engineering-Aufwand, lange Integrationszeiten und eingeschränkte Skalierbarkeit.

Um genau diese Herausforderungen zu lösen, kombiniert Kendrion seine SIL3/PLe Sicherheitssteuerung mit einer Safety Bibliothek , welche kinematische Funktionen für Roboteranwendungen enthält. Die offene Safety-Architektur ermöglicht eine herstellerunabhängige Integration in EtherCAT- und FSoE-basierte Robotiksysteme und reduziert die Abhängigkeit von proprietären Roboterplattformen.
Mit integrierter Safety-Bibliothek für Bewegungs-, Kraft- und Raumzonenüberwachung, minimale Zykluszeit 2 ms und Unterstützung für bis zu 9 Achsen schafft Kendrion die Grundlage für flexible, skalierbare und normkonforme Robotik-Sicherheitskonzepte bis SIL 3 / PLe.
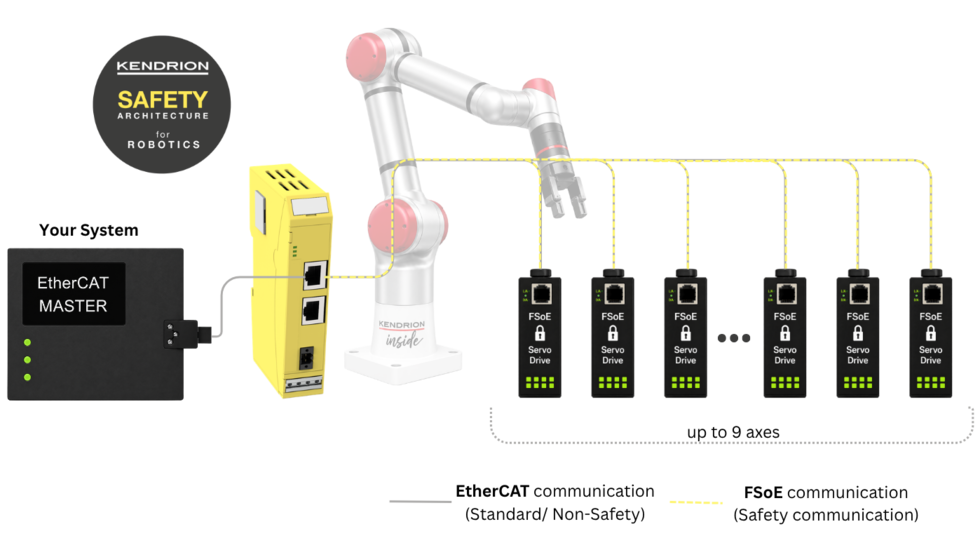
Die Kendrion Safety Architecture for Robotics ermöglicht die nahtlose Integration moderner Robotiksicherheitsfunktionen in bestehende EtherCAT- und FSoE-Netzwerke. Der EtherCAT-Master kommuniziert dabei über die Kendrion Safety PLC direkt mit den sicheren FSoE-Servo-Antrieben und bildet eine durchgängige Safety-Kommunikation für Roboter mit bis zu 9 Achsen.
Die Safety PLC übernimmt die kinematische Sicherheitsüberwachung der gesamten Roboterbewegung und verarbeitet sicherheitsrelevante Daten aller eingebundenen Achsen und Antriebe in Echtzeit mit einer minimalen Zykluszeit von unter 2 ms. Bewegungen, Geschwindigkeiten, Kräfte sowie Raum- und Abstandszonen werden kontinuierlich überwacht – unabhängig vom eingesetzten Robotersystem oder Antriebshersteller.
Dank der offenen und skalierbaren Architektur lassen sich bestehende Automatisierungs-, Motion-Control- und Servo-Drive-Konzepte flexibel weiter nutzen und effizient um moderne Sicherheitsfunktionen erweitern – mit bestehenden Robotik-Controllern.
Cobots — schnell, sicher und ohne Einhausung
Der Einsatz von Cobots scheitert in der Praxis oft an Sicherheitsanforderungen: Entweder wird die Geschwindigkeit stark reduziert, um zulässige Kräfte einzuhalten, oder der Cobot wird - wie ein klassischer Industrieroboter - räumlich abgesichert. Beides steht einer effizienten Mensch-Roboter-Kollaboration entgegen.
Kendrion schafft hier eine leistungsfähige Alternative. Mit skalierbaren Sicherheitssteuerungen und applikationsspezifischen Safety-Bibliotheken lassen sich Cobots dynamisch regeln — für maximale Produktivität bei gleichzeitig höchstem Sicherheitsniveau. So bleibt die Zusammenarbeit zwischen Mensch und Maschine schnell, flexibel und normkonform.
Auch bei klassischen Industrierobotern — etwa in der Teach-In- oder Servicephase — lassen sich verschärfte Sicherheitsanforderungen zuverlässig erfüllen. Bereits in Kürze sind die Lösungen verfügbar, die auf die ab 2028 geltenden Vorgaben ausgelegt sind.
Mit der Kendrion Sicherheitsarchitektur für Roboterkinematik bereit für 2028!
Die neue ISO 10218:2025 erweitert den Sicherheitsansatz von der klassischen Absicherung einzelner Roboterbewegungen hin zur ganzheitlichen Betrachtung der gesamten Roboterapplikation. Dabei werden dynamische Schutzräume, kontextabhängige Sicherheitsreaktionen sowie erweiterte Funktionen für die Mensch-Roboter-Kollaboration und die sichere Kraftüberwachung zum neuen Standard.
Unsere Kendrion Safety PLC mit integrierter Sicherheitsbibliothek unterstützt diesen Wandel mit leistungsfähigen Sicherheitsfunktionen auf Applikationsebene. Erweiterte sichere Raumüberwachung, adaptive Sicherheitslogik sowie modellgestützte, sichere Kraft- und Leistungsbegrenzung ermöglichen flexible, effiziente und gleichzeitig normkonforme Automatisierungslösungen. Damit schaffen wir die Grundlage für sichere, intelligente und zukunftsfähige Robotikanwendungen.
Sicherheitskfunktionen auf höchstem Level gemäß neuster Anforderungen
| ISO 10218:2011 | ISO 10218:2025 | Abdeckung durch Kendrion Safety Architektur | |
|---|---|---|---|
| Sicherheitsfokus | Fokus auf Roboter und TCP/Werkzeugbahn | Gesamte Roboterapplikation sicherheitsrelevant | ✔ Erweiterte Sicherheitsfunktionen auf Applikationsebene |
| Schutzräume | Überwiegend statische Sicherheitszonen | Dynamische und adaptive Schutzräume | ✔ Erweiterte sichere Raumzonenüberwachung |
| Sicherheitsreaktion | Meist feste Sicherheitsreaktionen | Kontextabhängige Sicherheitsreaktionen | ✔ Adaptive Sicherheitslogik |
| Kollaboration | Grundlegende Kollaborationsfunktionen | Erweiterte PFL- und SSM-Sicherheitsfunktionen | ✔ Sichere Kollaborationsfunktionen |
| Kraftüberwachung | Begrenzte Anforderungen an sichere Kraftbewertung | Validierte sichere Kraft- und Leistungsbegrenzung | ✔ Sichere Kraft |
| Raumüberwachung | Einfache sichere Bereiche | Erweiterte sichere Raum- und Abstandszonen | ✔ Sichere Raum- und Abstandszonen |
Komplexe Kinematikberechnung in Echtzeit
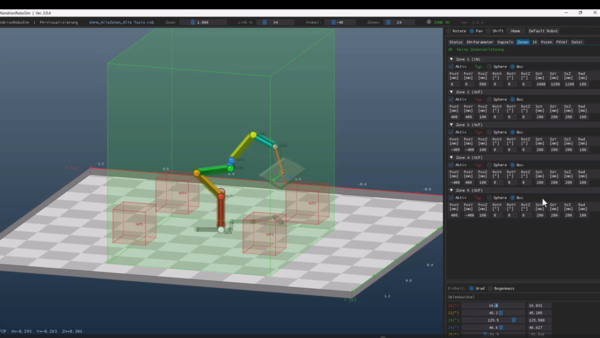
Die Kendrion Safety-Architektur für die Robotik kombiniert hochperformante kinematische Berechnungen mit präziser Echtzeitverarbeitung für moderne Robotiksysteme. Selbst komplexe Roboterkinematiken mit bis zu 9 Achsen, bis zu 20 Sicherheitszonen und dynamischen Sicherheitsfunktionen werden zuverlässig und deterministisch verarbeitet.
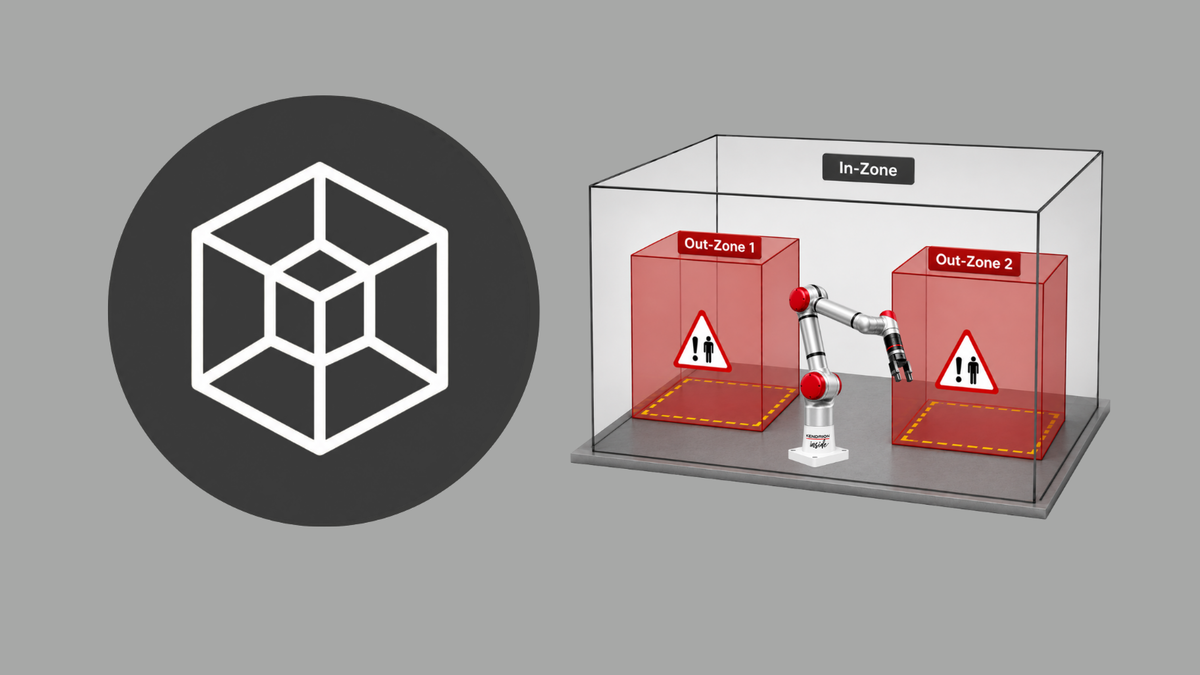
Die skalierbare Safety-Architektur ermöglicht ultraschnelle Berechnungen von Bewegungen, Geschwindigkeiten, Positionen und externen Kräften auf Link-Ebene. Gleichzeitig werden flexible 3D-Sicherheitszonen sowie In- und Out-Zonen kontinuierlich in Echtzeit überwacht.
Aufgrund ihrer leistungsfähigen Berechnungsarchitektur ist die Kendrion-Lösung ideal für anspruchsvolle Robotikanwendungen mit hohen Anforderungen an Dynamik, Präzision und funktionale Sicherheit geeignet.

Was bedeutet ISO 10218:2025 für die Sicherheit von Industrierobotern?
Was bedeutet ISO 10218:2025 für die Sicherheit von Industrierobotern?
Mit dem Update der ISO 10218:2025 rückt die Sicherheit der gesamten Roboterapplikation stärker in den Fokus. Neben den Achsbewegungen und dem Tool Center Point (TCP) werden auch das Werkzeug, das Werkstück, die Bewegung, die Geschwindigkeit, die Kraft, das Drehmoment, die Sicherheitszonen sowie die Mensch-Roboter-Interaktion betrachtet.
Das bedeutet für Roboterhersteller, Maschinenbauer und Systemintegratoren, dass sie die Robotersicherheit bereits in der Architekturplanung berücksichtigen müssen.
Wer in den kommenden Jahren neue Roboterplattformen oder Roboterzellen entwickelt, sollte die Anforderungen aus ISO 10218:2025 und der neuen EU-Maschinenverordnung bereits heute berücksichtigen.
Was ist die Kendrion Sicherheitsarchitektur für die Robotik?
Was ist die Kendrion Sicherheitsarchitektur für die Robotik?
Die Kendrion Sicherheitsarchitektur für die Robotik ist eine offene Sicherheitsarchitektur für moderne Roboterkinematik. Die Kombination einer SIL 3 / PLe Safety PLC mit einer Robotik-Safety-Bibliothek für sicherheitsgerichtete Funktionen stellt einen bedeutenden Fortschritt in diesem Bereich dar.
Die Lösung überwacht Roboterbewegungen, Geschwindigkeiten, Kräfte, Drehmomente und Sicherheitszonen in Echtzeit. Kendrion unterstützt damit Roboterhersteller, Maschinenbauer und Systemintegratoren beim Aufbau einer skalierbaren Safety-Architektur für EtherCAT- und FSoE-basierte Robotik Systeme.
Welche technischen Voraussetzungen braucht die Kendrion Robotik-Safety?
Welche technischen Voraussetzungen braucht die Kendrion Robotik-Safety?
Die Kendrion Sicherheitsarchitektur ist eine Lösung, die speziell für den Einsatz in Robotiksystemen mit EtherCAT-Master und sicheren FSoE-Antrieben entwickelt wurde. FSoE steht für "Fail Safe over EtherCAT" und ermöglicht eine sichere Kommunikation innerhalb eines EtherCAT-basierten Automatisierungssystems.
Für die kinematische Sicherheitsüberwachung werden außerdem relevante Roboterdaten benötigt, zum Beispiel Achsinformationen, Kinematikmodell, Positionsgrenzen, Geschwindigkeitsgrenzen, Kraft- und Drehmomentgrenzen sowie Anforderungen an Sicherheitszonen.
Was ist der Unterschied zwischen den Sicherheitssteuerungen Motion, Force und Zone?
Was ist der Unterschied zwischen den Sicherheitssteuerungen Motion, Force und Zone?
Motion stellt die Ausbaustufe für die sichere Bewegungsüberwachung dar. Sie überwacht Positionen, Geschwindigkeiten sowie Positions- und Geschwindigkeitsgrenzen. Motion ist insbesondere für klassische Industrierobotik-Anwendungen geeignet, bei denen sichere Positions- und Geschwindigkeitsüberwachung im Vordergrund steht.
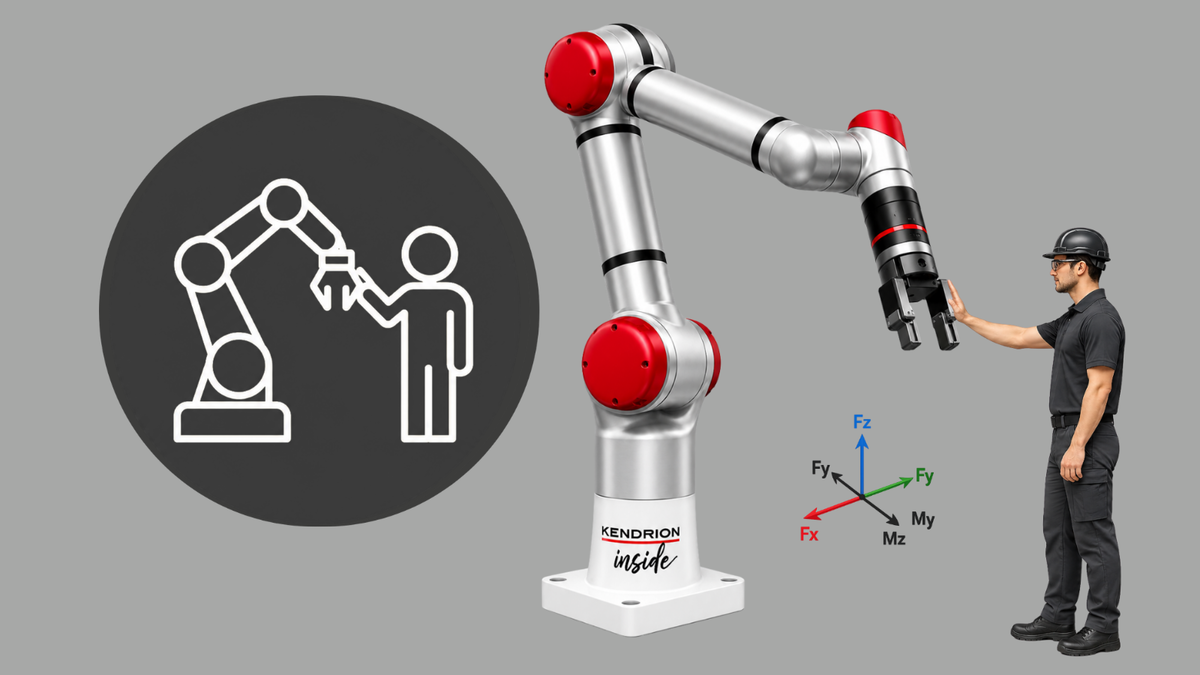
Force ergänzt Motion um die Funktionen der Kraft- und Drehmomentüberwachung. Diese Ausbaustufe ist von besonderer Relevanz für Cobots und Mensch-Roboter-Kollaboration, bei denen Bewegungen und Interaktionen sicher bewertet werden müssen.
Zone erweitert die Architektur um flexible 3D-Zonenüberwachung. Damit lassen sich konfigurierbare Sicherheitszonen, Link-Geometrien und TCP-Bereiche überwachen. Zone ist insbesondere für komplexe Roboterzellen, MRK-Anwendungen und dynamische Arbeitsräume geeignet.
Warum ist eine offene Robotik-Sicherheitsachitektur ein Vorteil?
Warum ist eine offene Robotik-Sicherheitsachitektur ein Vorteil?
Eine offene Robotik-Sicherheitsarchitektur reduziert die Abhängigkeit von proprietären Robotersteuerungen und herstellerspezifischen Safety-Lösungen. Dies ist insbesondere relevant für Unternehmen, die verschiedene Roboterplattformen, Antriebssysteme oder Maschinenvarianten mit einer einheitlichen Sicherheitsarchitektur abdecken möchten.
Kendrion ermöglicht die nahtlose Integration in bestehende EtherCAT- und FSoE-basierte Automatisierungssysteme. Dadurch können bestehende Steuerungs- und Antriebskonzepte weiterverwendet werden, der Engineering-Aufwand wird reduziert und zukünftige Robotikplattformen lassen sich flexibler skalieren.
